
CXC Home | Search | Help | Image Use Policy | Latest Images | Privacy | Accessibility | Glossary | Q&A
June 6, 2002
RELEASE: 02-06
With NASA's Chandra X-ray Observatory, astronomers have detected features that may be the first direct evidence of the effect of gravity on radiation from a neutron star. This finding, if confirmed, could enable scientists to measure the gravitational field of neutron stars and determine whether they contain exotic forms of matter not seen on Earth.
A team led by George Pavlov of Penn State University in University Park observed 1E 1207.4-5209, a neutron star in the center of a supernova remnant about 7,000 light years from Earth. The results were presented on June 6, 2002, at the American Astronomical Society in Albuquerque, NM.
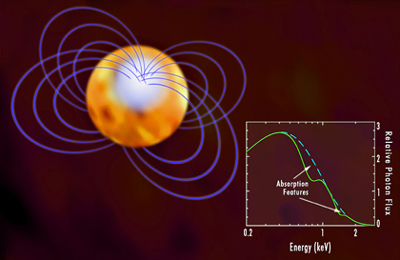
Pavlov's group found two dips, or absorption features, in the spectrum of X-rays from the star. If these dips are due to the absorption of X-rays near the star by helium ions in a strong magnetic field, they indicate that the gravitational field reduces the energies of X-rays escaping from near the surface of a neutron star.
"This interpretation is consistent with the data," said Pavlov, "but the features may be a blend of many other features. More precise measurements, preferably with Chandra's grating spectrometer, are needed."
"These absorption features may be the first evidence of the effect of gravity on radiation near the surface of an isolated neutron star," said Pavlov. "This is particularly important because it would allow us to set limits on the type of matter that comprises this star."
Neutron stars are formed when a massive star runs out of fuel and its core collapses. A supernova explosion occurs and the collapsed core is compressed to a hot object about 12 miles in diameter, with a thin atmosphere of hydrogen and possibly heavier ions in a gravitational field 100 billion times as strong as Earth's.
These objects, which have a density of more than 1 billion tons per teaspoonful, are called neutron stars because they have been thought to be composed mostly of neutrons. Although neutron stars have been studied extensively for more than three decades, their exact nature is still unknown.
"We are not even sure that neutron stars are composed of neutrons," said Divas Sanwal, also of Penn State, and lead author on a paper describing the team's results. "They could be largely composed of subatomic particles called pions or kaons, or even free quarks."
One key to narrow the range of possibilities is to measure the strength of gravity on the surface of a neutron star by observing its effect on X-rays from very near the surface of the star. According to Einstein's theory of General Relativity, attraction of photons by a star's gravitational field results in a lower energy of the photon (longer wavelength of radiation) when detected by a distant observer. The measurement of this gravitational redshift relates the mass to the radius of the star, and it will test the theories for the various possible forms of dense matter.
The team, which also includes Slava Zavlin of Max Plank Institute for Extraterrestrial Physics, Germany, and Marcus Teter of Penn State, considered several possible explanations for the absorption features observed from 1E 1207. The strength and X-ray energy of the features make it improbable that they are due to intervening interstellar material or absorption due to electrons or ions circling in a strong magnetic field. The most likely hypothesis, they conclude, is that the features are due to absorption by helium ions in a magnetic field about a hundred trillion times more intense than the Earth's magnetic field. In this case, the gravitational redshift reduces the energy of the X-rays by 17 percent.
Pavlov and his colleagues observed 1E 1027 with Chandra's Advanced CCD Imaging Spectrometer on January 6, 2000, and again on January 5, 2002, each time for approximately 30,000 seconds.
The ACIS instrument was built for NASA by Penn State and the Massachusetts Institute of Technology, Cambridge, Mass. under the leadership of Gordon Garmire of Penn State. NASA's Marshall Space Flight Center, Huntsville, Ala., manages the Chandra program for the Office of Space Science, Washington, DC. TRW, Inc., Redondo Beach, Calif., is the prime contractor for the spacecraft. The Smithsonian's Chandra X-ray Center controls science and flight operations from Cambridge, Mass.
MEDIA CONTACTS
Steve Roy
Marshall Space Flight Center, Huntsville, AL
Phone: 256-544-6535
Megan Watzke
Chandra X-ray Observatory Center, CfA, Cambridge, MA
Phone: 617-496-7998
cxcpress@cfa.harvard.edu
Revised: March 07, 2008